


Кейс: как я делал робота
Поступил заказ на доработку робота. Начальные вводные: робот уже есть, трёхколёсная база, управляется через консоль. ssh доступ до raspbery, которая находится на борту робота.
Нужно сделать более дружелюбное управление и более мощную колёсную базу, чтоб робот лучше управлялся, ездил более плавно и мог преодолеть дверной порог высотой 1 см.
Решение:
Переделана колёсная база: вместо одного ведущего колеса их теперь два. Вместо поворота с помощью сервомоторов — поворот теперь осуществляется за счет изменения скорости вращения двух ведущих колёс относительно друг друга. Установлены более мощные двигатели и соответственно драйвер двигателей.
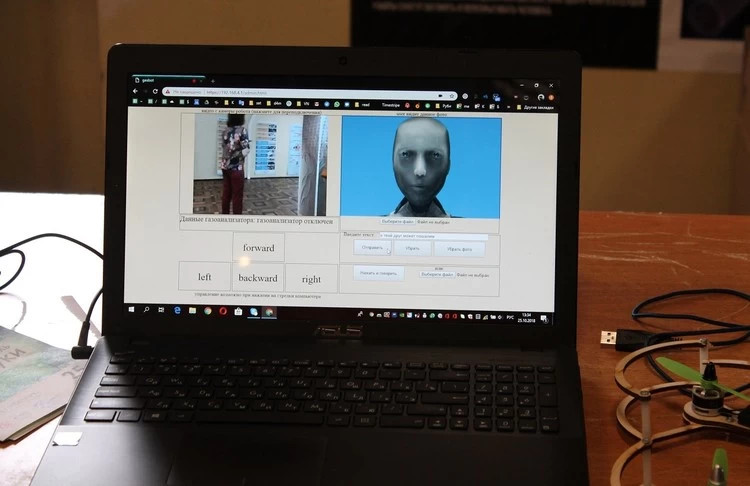
Для raspbery написан веб-интерфейс, позволяющий видеть и слышать то, что происходит перед роботом. Можно управлять движением робота стрелками на клавиатуре или на экране. Как с ПК так и с мобильного интерфейса. На экран, установленные на роботе можно выводить картинки и текст. По умолчанию на экран выводится картинка с лицом робота.
Система работает на node.js
Над проектом работали:
Анатолий
Антон
Иван
Федор